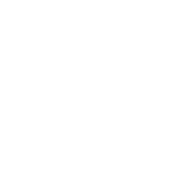
Collisions are bound to occur no matter how good a hash function is. Hence, to maintain the performance of a hash table, it is important to minimise collisions through various collision resolution techniques. 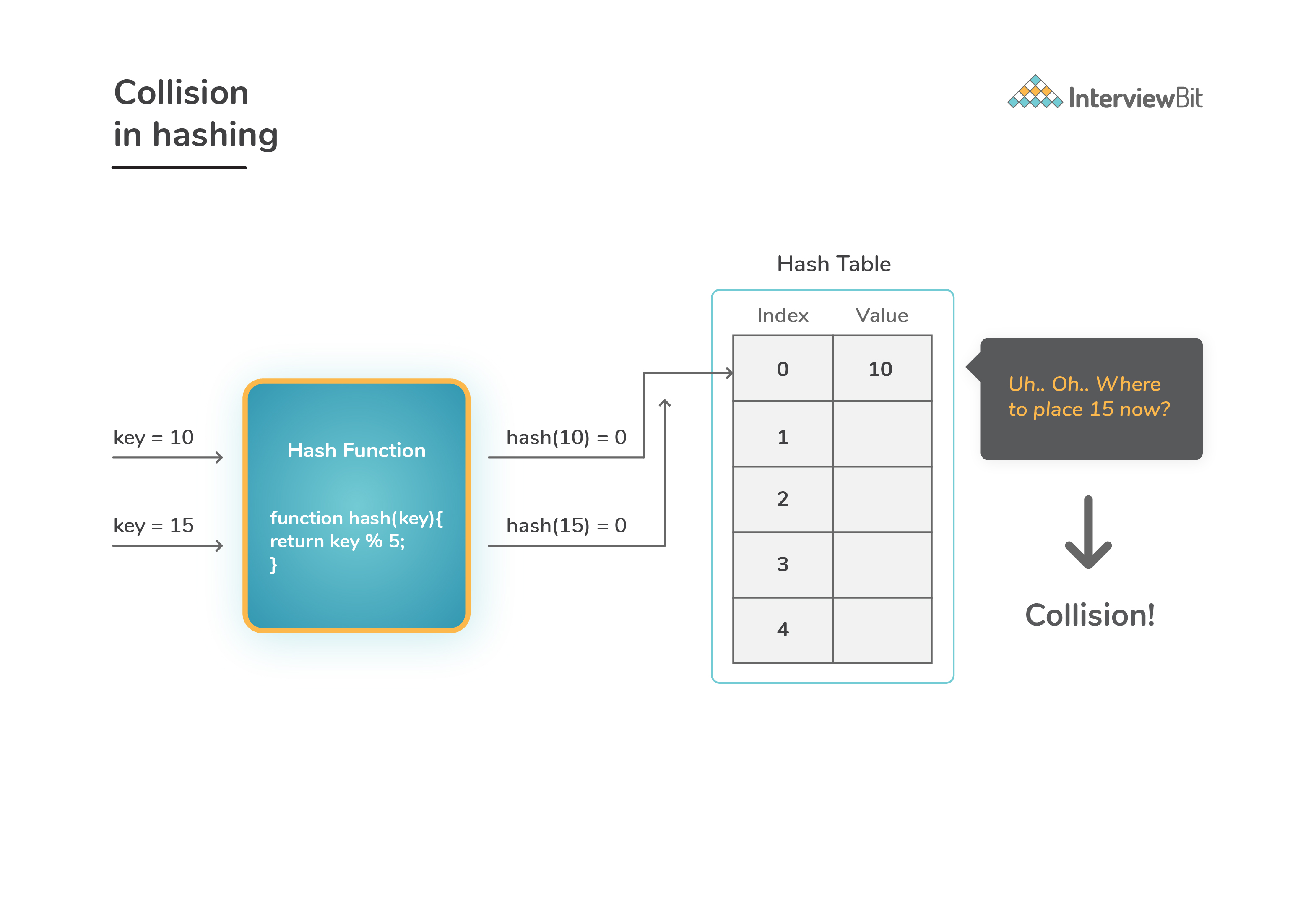 There are majorly 2 methods for handling collisions:
There are majorly 2 methods for handling collisions:
- Separate Chaining
- Open Addressing
Seperate Chaining
-
Here the main idea is to make each slot of hash table point to a linked list of records that have the same hash value.
![]()
-
Performance Analysis:
- Hashing performance can be evaluated under the assumption that each key is equally likely and uniformly hashed to any slot of hash table.
-
Consider
table_sizeas number of slots in hash table andnas number of keys to be saved in the table. Then:We have Load factor α = n/table_size Time complexity to search/delete = O(1 + α) Time complexity for insert = O(1) Hence, overall time complexity of search, insert and delete operation will be O(1) if α is O(1)
-
Advantages of Separate Chaining:
- This technique is very simple in terms of implementation.
-
We can guarantee that the insert operation always occurs in
O(1)time complexity as linked lists allows insertion in constant time. - We need not worry about hash table getting filled up. We can always add any number elements to the chain whenever needed.
- This method is less sensitive or not very much dependent on the hash function or the load factors.
- Generally this method is used when we do not know exactly how many and how frequently the keys would be inserted or deleted.
-
Disadvantages of Separate Chaining:
- Chaining uses extra memory space for creating and maintaining links.
- It might happen that some parts of hash table will never be used. This technically contributes to wastage of space.
-
In the worst case scenario, it might happen that all the keys to be inserted belong to a single bucket. This would result in a linked list structure and the search time would be
O(n). - Chaining cache performance is not that great since we are storing keys in the form of linked list. Open addressing techniques has better cache performance as all the keys are guaranteed to be stored in the same table. We will explore open addressing techniques in the next section.
Open Adressing
-
In this technique, we ensure that all records are stored in the hash table itself. The size of the table must be greater than or equal to the total number of keys available. In case the array gets filled up, we increase the size of table by copying old data whenever needed. How do we handle the following operations in this techniques? Let’s see below:
-
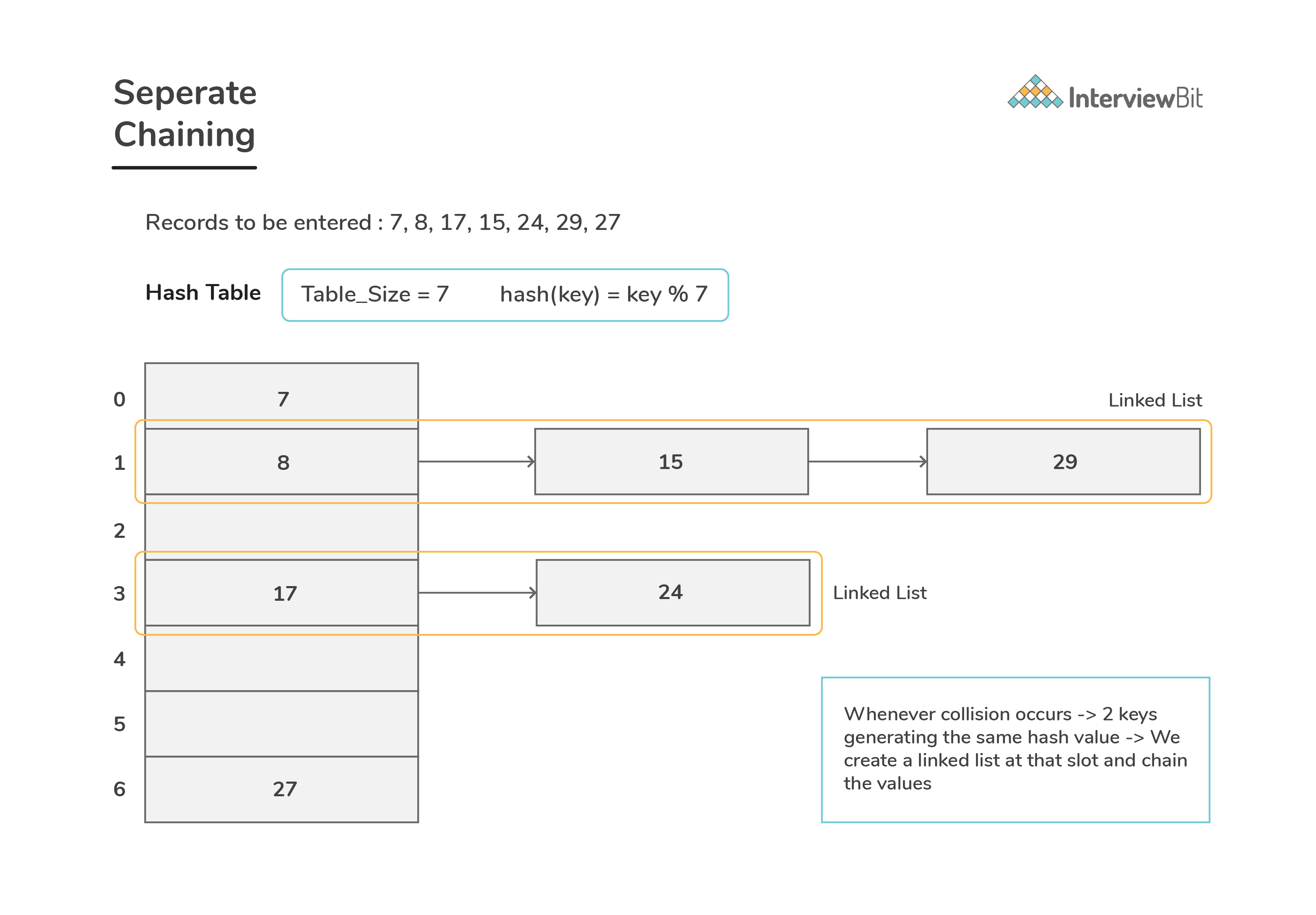
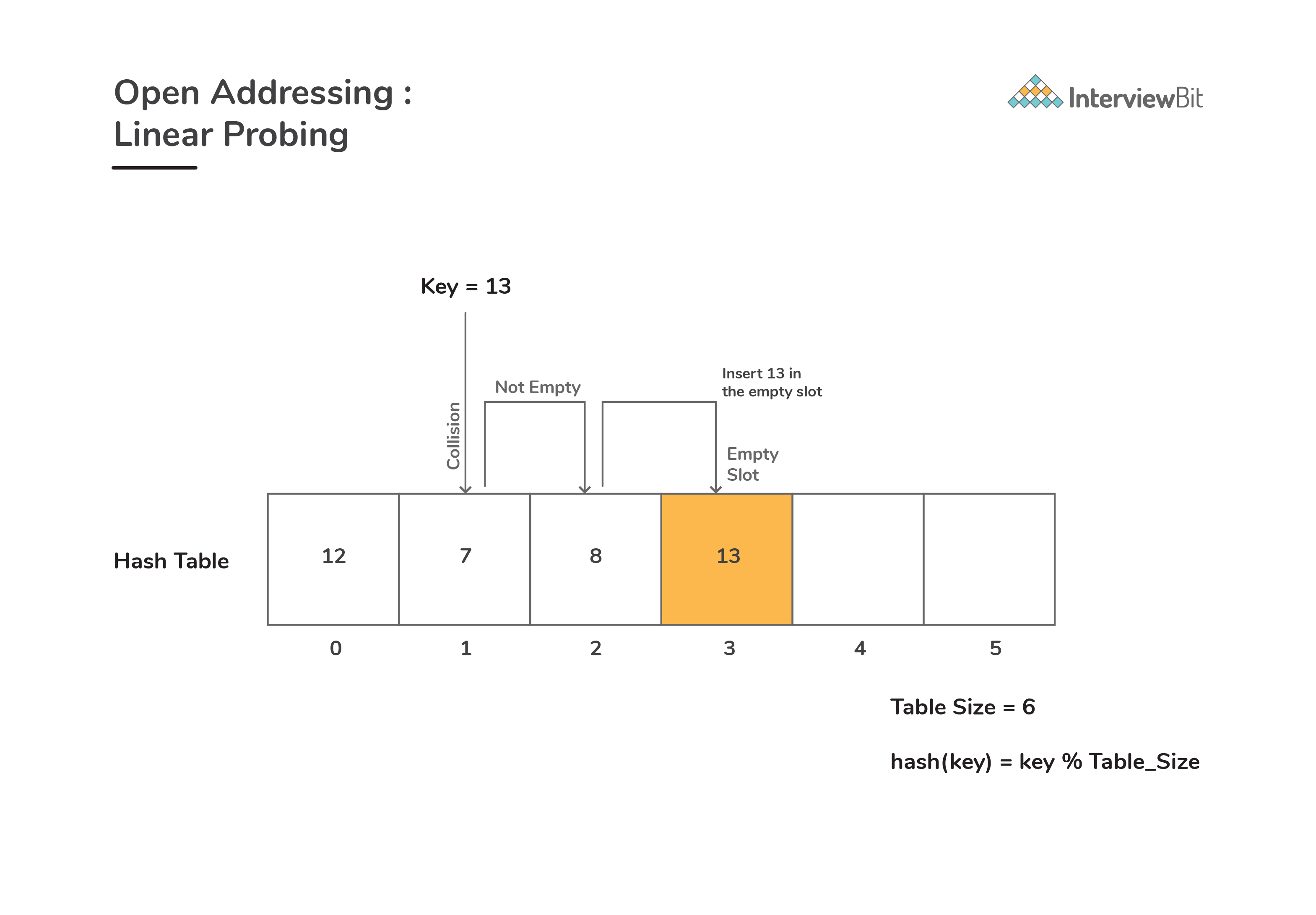
Insert(key): When we try to insert a key to the bucket which is already occupied, we keep probing the hash table until an empty slot is found. Once we find the empty slot, we insert
keyinto that slot.![]()
-
Search(key): While searching for
keyin the hash table, we keep probing until slot’s value doesn’t become equal tokeyor until an empty slot is found. -
Delete(key): While performing delete operation, when we try to simply delete
key, then the search operation for that key might fail. Hence, deleted key’s slots are marked as “deleted” so that we get the status of the key when searched.
-
Insert(key): When we try to insert a key to the bucket which is already occupied, we keep probing the hash table until an empty slot is found. Once we find the empty slot, we insert
- The term “open addressing” tells us that the address or location of the key to be placed is not determined by its hash value.
-
Following are the techniques for following open addressing:
-
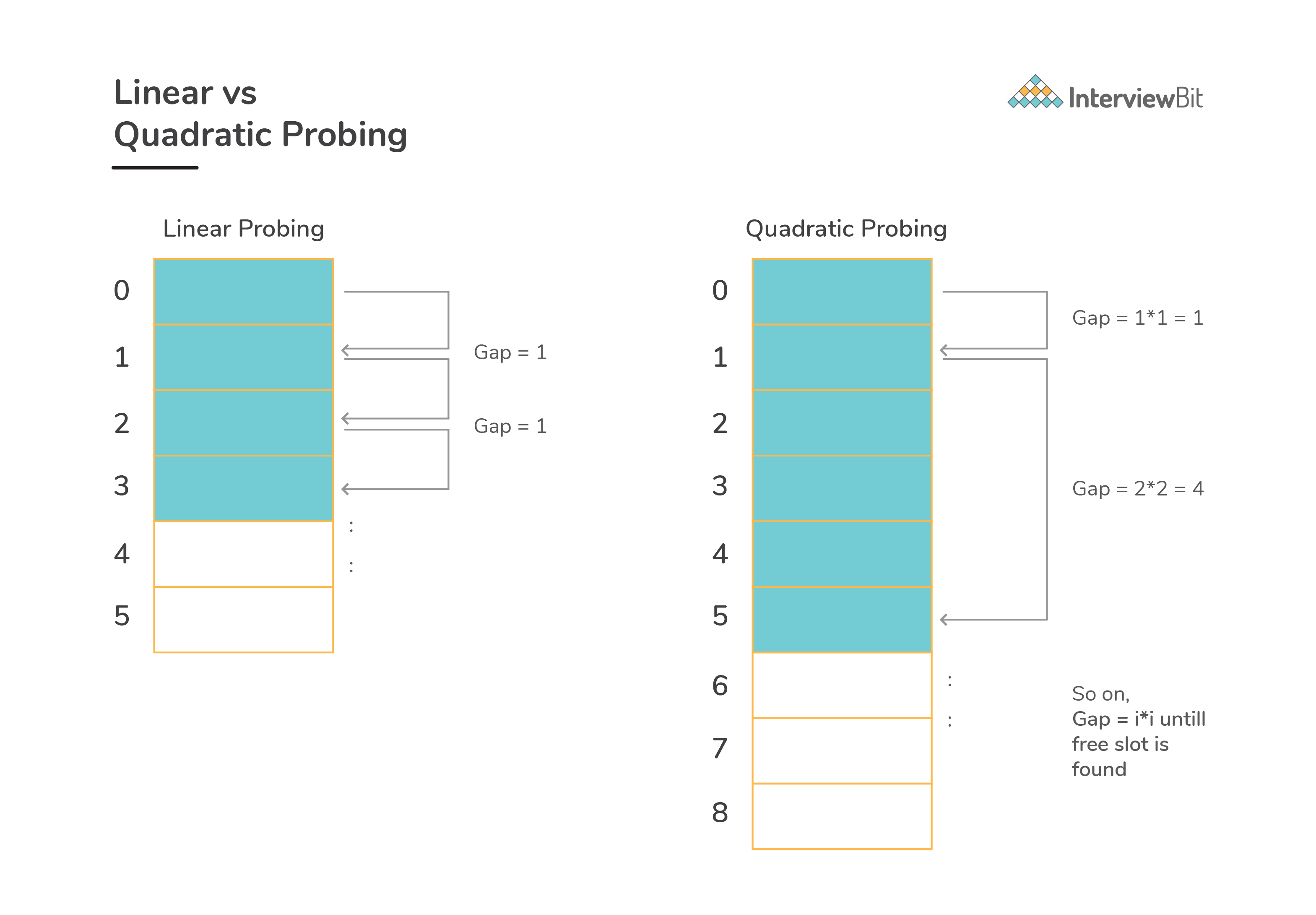
Linear Probing:
- In this, we linearly probe for the next free slot in the hash table. Generally, gap between two probes is taken as 1.
-
Consider
hash(key)be the slot index computed using hash function andtable_sizerepresent the hash table size. Supposehash(key)index has a value occupied already, then:We check if (hash(key) + 1) % table_size is free If ((hash(key) + 1) % table_size) is also not free, then we check for ((hash(key) + 2) % table_size) If ((hash(key) + 2) % table_size) is again not free, then we try ((hash(key) + 3) % table_size), : : : and so on until we find the next available free slot - When performing search operation, the array is scanned linearly in the same sequence until we find the target element or an empty slot is found. Empty slot indicates that there is no such key present in the table.
![]()
- Disadvantage: There would be cases where many consecutive elements form groups and the time complexity to find the available slot or to search an element would increase greatly thereby reducing the efficiency. This phenomenon is called as clustering.
-
Quadratic Probing:
- In this approach, we look for i2-th slot in i-th iteration.
-
Consider
hash(key)be the slot index required to place key computed using hash function andtable_sizeis the size of hash table available, then:
If slot (hash(key) % table_size) is not free, then we check for availability of ((hash(key) + 1*1) % table_size) If ((hash(key) + 1*1) % table_size) is again full, then we check for ((hash(key) + 2*2) % table_size) If ((hash(key) + 2*2) % table_size) is not empty, then we check for the status of ((hash(key) + 3*3) % table_size) : : : and so on until we find the next available empty slot.![]()
-
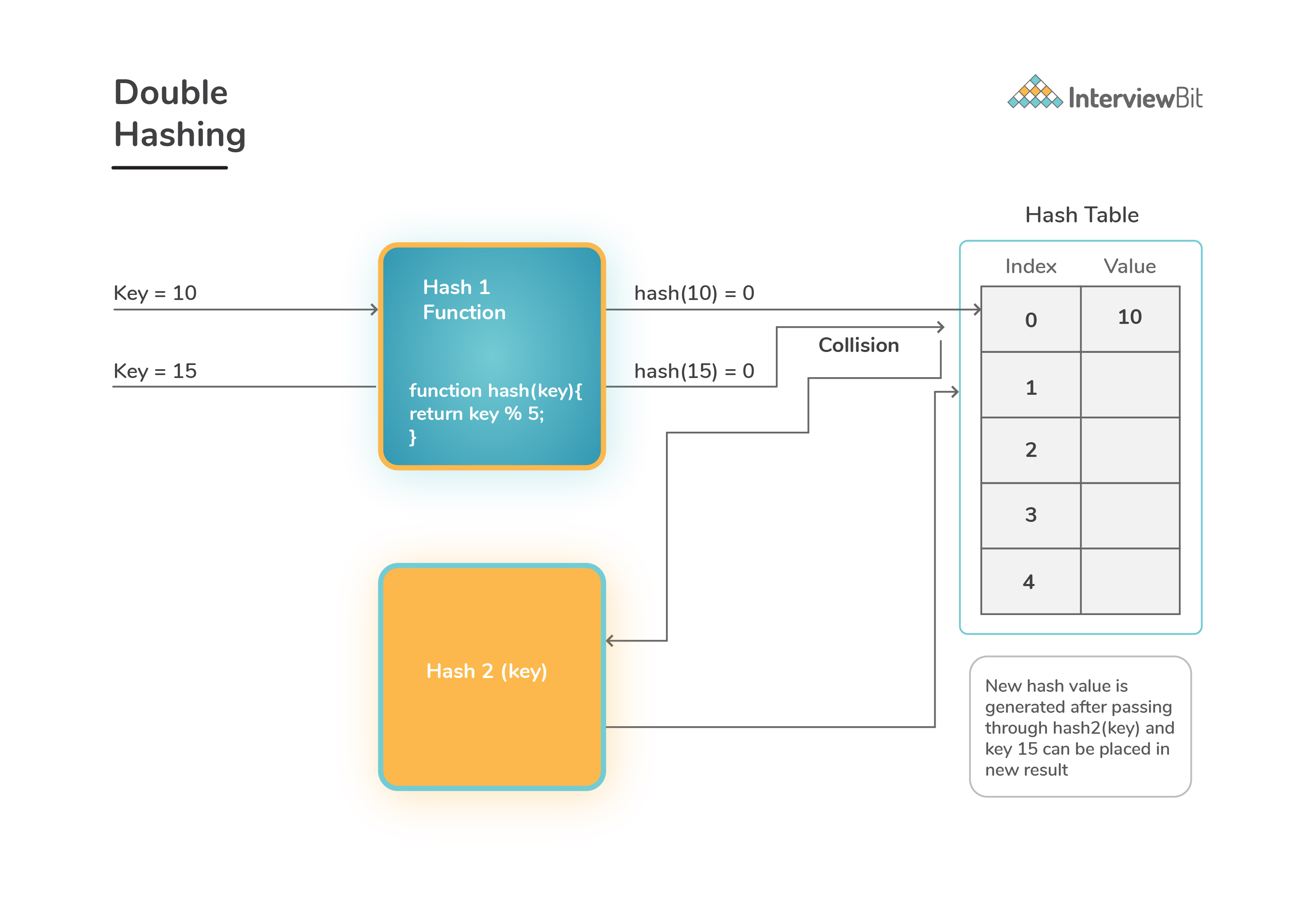
Double Hashing:
-
In this method: we follow the idea of applying a second hash function on the key whenever a collision occurs.
![]()
-
It can be done as follows:
(hash1(key) + c * hash2(key)) % Table_Size , where c keeps incremented by 1 upon every collision to find the next free slot.-
Here
hash1()is the first hash function andhash2()is the second hash function applied in case of collision andTable_Sizeis the size of hash table. -
First hash function can be defined as
hash1(key) = key % Table_Size. Second hash function is popularly likehash2(key) = prime_no – (key % PRIME)whereprime_nois a prime number smaller thanTable_Size.
-
Here
-
In this method: we follow the idea of applying a second hash function on the key whenever a collision occurs.
-
-
Analysis of Open Addressing:
- The performance of hashing technique can be evaluated under the assumption that each key is equally likely and uniformly hashed to any slot of the hash table.
-
Consider
table_sizeas total number of slots in the hash table,nas number of keys to be inserted into the table, then:* Load factor, α = n/table_size ( α < 1 ) * Expected time taken to search/insert/delete operation < (1/(1 - α)) * Hence, search/insert/delete operations take at max (1/(1 - α)) time


 Video Courses
Video Courses